您当前的位置: 首页 >> 科技前沿 >> 国内动态
-

特斯拉第二季度营收169.34亿…
新浪科技讯北京时间7月21日凌晨消息,特斯拉汽车今天公布了该公司的2022财年第二季度财报。报告显示,特斯拉汽车第二季度营收为169.34亿… -
贵州数字经济增速连续6年全国第一
科技日报记者何星辉日前,在贵州省第十三届人民代表大会第五次会议上,贵州省省长李炳军在作政府工作报告时提到,2021年贵州数字经济加速突破,增…

神十三航天员出舱,水下机械臂智能控制曾助他们一臂之力
- 发布时间:2021-11-10 点击次:1222
-
科技日报记者 金凤 通讯员 王伟 柯龙婕旻
11月8日1时16分,经过约6.5小时的出舱活动,神舟十三号航天员乘组密切协同,圆满完成出舱活动全部既定任务,航天员翟志刚、王亚平安全返回天和核心舱,出舱活动取得圆满成功。据了解,南京航空航天大学科研团队参与研制的“水下机械臂及其智能控制系统”此前提供了重要技术保障。
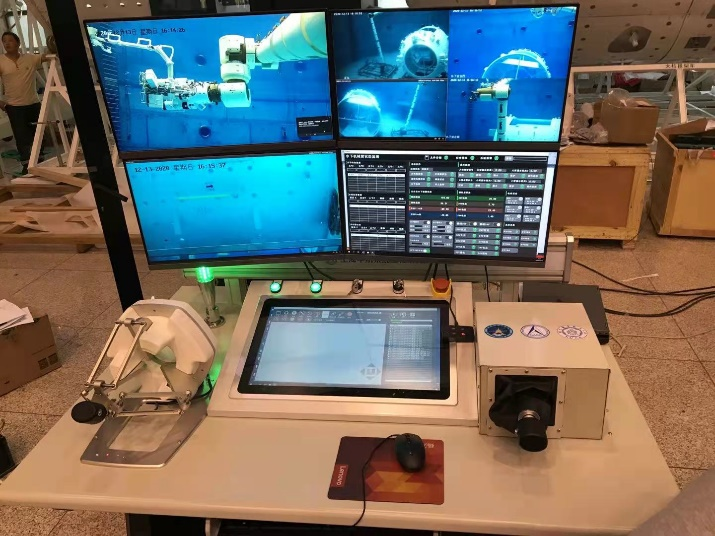
张得礼课题组参与研制的水下机械臂及其控制系统中的人机交互操作控制系统。张得礼供图
应中国航天员科研训练中心、上海宇航系统工程研究所委托,南京航空航天大学机电学院张得礼副教授领衔课题组(以下简称“课题组”)参与研制“水下机械臂及其智能控制系统”,该系统逼真地模拟了空间站出舱活动的机械臂转运以及定点作业支持工况,是出舱活动任务工程实验验证和航天员训练的重要保障。
在中国航天员科研训练中心总体单位指导下,上海宇航系统工程研究所联合课题组经过技术途径仿真验证、总体方案设计、工程实施、调试联试以及试运行,创新性研制出了国内首台10米级水下大作业空间、高可靠性、高安全性水下机械臂。
张得礼介绍,课题组模拟失重环境的中性浮力水槽环境,开展了水下机械臂控制系统、人机交互系统以及供配电支持系统的学术研究与工程研制,课题组突破了基于多传感融合和基于优化算法的水下路径规划技术、水下机械臂人机交互控制技术、虚拟孪生的大尺寸空间碰撞检测预测技术、水下安全监控技术等,有力保障了整系统的可靠、高效运行,是水下机器人控制技术在载人航天模拟失重训练应用的一次突破。